1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
|
MangOH Motion Service
======
This application is designed to operate on a [MongOH Red](https://mangoh.io/mangoh-red-new) WP85 board. Using **general input output** this project uses pthreads to probe the onboard bmi160 chip intermittently in order to detect a significant motion on the board.
## Prerequisites
When cloning use ``git clone https://github.com/brnkl/motion-service.git``.
## Building
Compile the project using
wp85: ``make wp85``
### Flags
- `-DMOTION_MONITOR_USE_THREAD` enables thread based mode (polling). By default, an interrupt pin is used to detect motion. This results in lower traffic on the bus (i2c or SPI), but also requires special drivers for the BMI160.
## Setting Variables
To change the sensitivity of impact detection you must edit the `motionMonitor/motionMonitor.c` file.
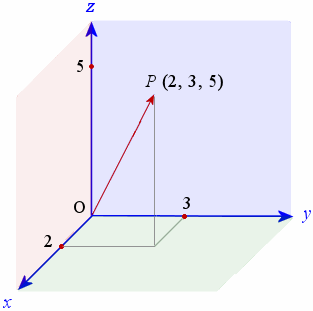
The Accelerometer measures acceleration in 3 dimensions, X, Y, and Z. These dimensions of acceleration are recorded and the magnitude of their resulting vector is calculated using ``double impactMagnitude = sqrt(x * x + y * y + z * z);``. As visualized in the image below.
`#define DEFAULT_THRESHOLD_MS2 17` determines the magnitude of the resulting vector that will trigger the application to detect a sudden impact.
If adjusting the value of `DEFAUTL_THRESHOLD_MS2` keep in mind that gravity implies a motionless magnitude of -9.8m/s^2.
## Bindings
App.adef
```
...
bindings:
{
myClientApp.myComponent.brnkl_motion -> motionService.brnkl_motion
}
...
```
Component.cdef
```
...
requires:
{
api:
{
brnkl_motion.api
}
}
...
```
## Example
For getting the current acceleration
```C
struct Acceleration{
double x;
double y;
double z;
};
struct Acceleration v = value;
le_result_t result = brnkl_motion_getCurrentAccleration(&v->x, &v->y, &v->z);
```
To get a list of all recent impacts.
```C
double xAcc[N_MAX_IMPACT_VALUES], yAcc[N_MAX_IMPACT_VALUES],
zAcc[N_MAX_IMPACT_VALUES];
uint64_t timestamps[N_MAX_IMPACT_VALUES];
size_t xSize = N_MAX_IMPACT_VALUES, ySize = N_MAX_IMPACT_VALUES,
zSize = N_MAX_IMPACT_VALUES, timestampsSize = N_MAX_IMPACT_VALUES;
le_result_t r = brnkl_motion_getSuddenImpact(
xAcc, &xSize, yAcc, &ySize, zAcc, &zSize, timestamps, ×tampsSize);
```
|
