1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
|
MangOH Motion Service
======
This application is designed to operate on a [MongOH Red](https://mangoh.io/mangoh-red-new) WP85 board. Using **general input output** this project uses pthreads to probe the onboard bmi160 chip intermittently in order to detect a significant motion on the board.
## Prerequisites
When cloning use ``git clone https://github.com/brnkl/motion-service.git``.
## Building
Compile the project using
wp85: ``make wp85``
## Setting Variables
To change the sensitivity of impact detection you must edit the `motionMonitor/motionMonitor.c` file.
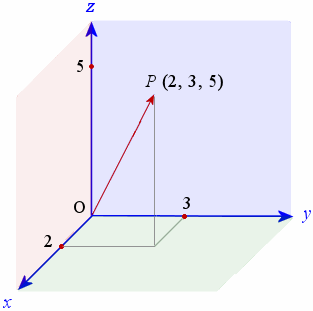
The Accelerometer measures acceleration in 3 dimensions, X, Y, and Z. These dimensions of acceleration are recorded and the magnitude of their resulting vector is calculated using ``double impactMagnitude = sqrt(x * x + y * y + z * z);``. As visualized in the image below.
`#define DEFAULT_THRESHOLD_MS2 17` determines the magnitude of the resulting vector that will trigger the application to detect a sudden impact.
If adjusting the value of `DEFAUTL_THRESHOLD_MS2` keep in mind that gravity implies a motionless magnitude of -9.8m/s^2.
## Bindings
App.adef
```
...
bindings:
{
myClientApp.myComponent.brnkl_motion -> motionService.brnkl_motion
}
...
```
Component.cdef
```
...
requires:
{
api:
{
brnkl_motion.api
}
}
...
```
<<<<<<< HEAD
## Example
For getting the current acceleration
```
struct Acceleration{
double x;
double y;
double z;
};
struct Acceleration v = value;
le_result_t result = brnkl_motion_getCurrentAccleration(&v->x, &v->y, &v->z);
```
To get a list of all recent impacts.
```
double xAcc[N_MAX_IMPACT_VALUES], yAcc[N_MAX_IMPACT_VALUES], zAcc[N_MAX_IMPACT_VALUES];
uint64_t timestamps[N_MAX_IMPACT_VALUES];
size_t xSize = N_MAX_IMPACT_VALUES, ySize = N_MAX_IMPACT_VALUES,
zSize = N_MAX_IMPACT_VALUES, timestampsSize = N_MAX_IMPACT_VALUES;
le_result_t r = brnkl_motion_getSuddenImpact(
xAcc, &xSize, yAcc, &ySize, zAcc, &zSize, timestamps, ×tampsSize);
if (r != LE_OK)
return r;
// NOTE this assumes that xSize == ySize == zSize == timestampsSize
// TODO could even assert/log this
int j = 0;
for (int i = 0; i < xSize; i++) {
recordRes[j++] =
le_avdata_RecordFloat(ref, "impactx", xAcc[i], timestamps[i]);
recordRes[j++] =
le_avdata_RecordFloat(ref, "impacty", yAcc[i], timestamps[i]);
recordRes[j++] =
le_avdata_RecordFloat(ref, "impactz", zAcc[i], timestamps[i]);
}
```
## Examples
For getting a list of impact information you may follow this example.
```
double x_arr [array_size];
double y_arr [array_size];
double z_arr [array_size];
uint64 timestamps[array_size];
// Fills arrays with x, y, and z acceleration that have been recorded at each impact.
le_result_t result = getSuddenImpact(x_arr, y_arr, z_arr, timestamps);
for (int i = 0; i < array_size; i++)
LE_INFO("X: %d - Y: %d - Z: %d - time: %ul", x_arr[i],
y_arr[i],
z_arr[i],
timestamps[i]);
```
For receiving the current acceleration only
```
double x_val;
double y_val;
double z_val;
le_result_t result = getCurrentAcceleration(x_val, y_val, z_val);
LE_INFO("Current Acceleration: X: %d - Y: %d - Z: %d");
```
|
